¿Por qué se escribieron los nombres “juanito” y “pepito” en el código?
¿Para qué se utilizan las dos diagonales en el código?
¿Cuál es la diferencia entre Serial.print y Serial.println?
Aprendiendo la terminología de Arduino IDE
¿Qué es sKetch?
Un programa de Arduino se denomina sketch o proyecto y tiene la extensión .ino. Importante: para que funcione el sketch, el nombre del fichero debe estar en un directorio con el mismo nombre que el sketch.
No es necesario que un sketch esté en un único fichero, pero si es imprescindible que todos los ficheros estén dentro del mismo directorio que el fichero principal y que este contenga obligatoriamente las funciones setup() y loop().
¿Qué es la función void setup ()?
La función setup() se invoca una sola vez cuando el programa empieza. Se utiliza para inicializar los modos de trabajo de los pins, o el puerto serie. Debe ser incluido en un programa aunque no haya declaración que ejecutar. Así mismo se puede utilizar para establecer el estado inicial de las salidas de la placa.
¿Qué es la función void loop ()?Después de llamar asetup(), la funciónloop()hace precisamente lo que sugiere su nombre, se ejecuta de forma cíclica, lo que posibilita que el programa esté respondiendo continuamente ante los eventos que se produzcan en la placa.
¿Cómo se agrega un bloque de comentario a un código de programación en Arduino IDE?
Los bloques de comentarios, o comentarios multi-línea son áreas de texto ignorados por el programa que se utilizan para las descripciones del código o comentarios que ayudan a comprender el programa. Comienzan con / * y terminan con * / y pueden abarcar varias líneas.
/* esto es un bloque de comentario no se debe olvidar
cerrar los comentarios estos deben estar equilibrados */
Debido a que los comentarios son ignorados por el compilador y no ocupan espacio en la memoria de Arduino pueden ser utilizados con generosidad. También pueden utilizarse para "comentar" bloques de código con el propósito de anotar informaciones para depuración y hacerlo mas comprensible para cualquiera.
¿Cómo se agrega una línea de comentario a un código de programación en Arduino IDE?
Una línea de comentario empieza con // y terminan con la siguiente línea de código. Al igual que los comentarios de bloque, los de línea son ignoradas por el programa y no ocupan espacio en la memoria.
// esto es un comentario
Una línea de comentario se utiliza a menudo después de una instrucción, para proporcionar más información acerca de lo que hace ésta o para recordarla más adelante.
¿Que es un baudio?
Unidad de medida de la velocidad de transmisión de señales que se expresa en símbolos por segundo.
El proyecto Arduino tiene sus orígenes en el proyecto Wiring, el cual surge por el año 2003 como una herramienta para estudiantes en el Interaction Design Institute Ivrea en Ivrea, Italia,con el objetivo de proporcionar una forma fácil y económica de que principiantes y profesionales crearan dispositivos que pudieran interactuar con su entorno mediante sensores y actuadores. La primera placa Arduino comercial fue introducida en el año 2005, ofreciendo un bajo costo económico y facilidad de uso para novatos y profesionales. A partir de octubre del año 2012, se incorporaron nuevos modelos de placas de desarrollo que empleaban microcontroladores Cortex M3, ARM de 32 bits,dichos modelos coexisten con los iniciales, que integran microcontroladores AVR de 8 bits. Cabe resaltar que las arquitecturas ARM y AVR no son iguales, por lo cual tampoco lo es su set de instrucciones a nivel ensamblador y por ende algunas librerías realizadas para operar en una arquitectura presenten complicaciones al ser empleadas en la otra. A pesar de lo anterior, todas los modelos de placa Arduino se pueden programar y compilar bajo el IDE predeterminado de Arduino sin ningún cambio, esto gracias a que el IDE compila el código original a la versión de la placa seleccionada.
rduino es hardware libre. Los diseños de referencia de hardware se distribuyen bajo licencia Creative Commons Attribution Share-Alike 2.5 y están disponibles en el sitio web de Arduino. Los esquemáticos y archivos de montaje de componentes (PCBs) para algunas versiones de placas también están disponibles
INFORMACION TOMADA DE :
https://www.ecured.cu/Rob%C3%B3tica
https://www.youtube.com/watch?v=Kgz0vD1vSxY
robotica
Técnica que se utiliza en el diseño y la construcción de robots y aparatos que realizan operaciones o trabajos, generalmente en instalaciones industriales y en sustitución de la mano de obra humana.
tres leyes de la robotica
Los primeros Robots construidos, en la tierra, eran modelos poco avanzados. Era una época en donde la Robopsicología no estaba muy bien desarrollada. Estos Robots podían ser enfrentados a situaciones en las cuales se vieran en un conflicto con sus leyes. Una de las situaciones más sencillas se da cuando un Robot debe dañar a un ser humano para evitar que dos o más sufran daño. Aquí los Robots decidían en función de un criterio exclusivamente cuantitativo, quedando luego inutilizados, al verse forzados a violar la primera ley.
Posteriores desarrollos en la Robótica, permitieron la construcción de circuitos más complejos, y por ende, con una mayor capacidad de autorreflexión. Una peculiaridad de los Robots es que pueden llegar a redefinir su concepto de "daño" según sus experiencias e incluso, llegar a determinar niveles de éste. Su valoración de los seres humanos también puede ser determinada por el ambiente.
Es así que un Robot puede llegar a dañar a un ser humano por proteger a otro que considere de más valía (su amo por ejemplo). También podría darse el caso de que un Robot dañara físicamente a un ser humano para evitar que otro sea dañado psicológicamente, pues llega a ser una tendencia el considerar los daños psicológicos más graves que los físicos.
Estas situaciones nunca se hubieran dado en Robots más antiguos. Asimov plantea en sus historias de Robots las más diversas situaciones, siempre considerando las posibilidades lógicas que podrían llevar a los Robots a tales situaciones.
Uno puede llegar a encariñarse con los Robots de Asimov, él que nos muestra en sus historias Robots cada vez más "humanos". En El hombrebicentenario, Asimov nos narra la historia de Andrew Martín, nacido Robot, y que luego de una vida de lucha, logró morir como un ser humano. Están también R. Daneel Olivaw y R. Giskard Reventlov, los cuales tienen un papel fundamental en la segunda expansión de los seres humanos y la posterior fundación del imperio galáctico. Estos dos personajes son importantes en la medida en que, siendo los Robots más complejos jamás creados, fueron capaces de desarrollar la ley cero de la Robótica (Zeroth law):
"Un Robot no puede hacer daño a la humanidad o, por inacción, permitir que la humanidad sufra daño."
Se supone que la Ley Cero sería el resultado de la reflexión filosófica por parte de estos Robots más sofisticados.
R Giskard muere luego de tener que dañar a un ser humano en virtud de la ley cero. El problema fundamental de esta ley está en el problema para definir "humanidad", así como para determinar qué "daña" a la humanidad. R. Daneel logró asimilar la ley cero gracias al sacrificio de Giskard, convirtiéndose desde entonces en el protector de la humanidad. Daneel se convierte en uno de los personajes más importantes del ciclo de Trántor (formado por los cuentos y novelas de Robots, las novelas del imperio, y la saga de las fundaciones: 17 libros) siendo además el punto que le da continuidad.
La Robótica abre una nueva y decisiva etapa en el actual proceso de mecanización y automatización creciente de los procesos de producción. Consiste esencialmente en la sustitución de máquinas o sistemas automáticos que realizan operaciones concretas, por dispositivos mecánicos que realizan operaciones concretas, por dispositivos mecánicos de uso general, dotados de varios grados de libertad en sus movimientos y capaces de adaptarse a la automatización de un número muy variado de procesos y operaciones.
La Robótica se ha caracterizado por el desarrollo de sistemas cada vez más flexibles, versátiles y polivalentes, mediante la utilización de nuevas estructuras mecánicas y de nuevos métodos de control y percepción.
La Robótica ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y cuenta con un correcto aparato teórico. Sin embargo, algunas cosas que para los humanos son muy sencillas, como andar, correr o coger un objeto sin romperlo, requieren una potencia de cálculo para igualarlas que no esta disponible todavía.
Sin embargo se espera que el continuo aumento de la potencia de los ordenadores y las investigaciones en inteligencia artificial, visión artificial y otras ciencias paralelas nos permitan acércanos un poco más cada vez a los milagros soñados por los primeros ingenieros y también a los peligros que nos adelanta la ciencia ficción.
ventajas del arduino en la robotica
Entornos de programación que permiten la programación sin escribir código
Entornos de programación por bloques que proporcionan la traducción al código
es una herramienta online ofrecida por Autodesk. Se utiliza de forma gratuita y sólo requiere crearse una cuenta de usuario. De entre sus utilidades, probablemente la más conocida es la de diseñar piezas en 3D. Sin embargo, ofrece también una posibilidad realmente interesante y es la de montar, programar y simular circuitos con Arduino.
Para utilizar Tinkercad sólo es necesario crear una cuenta gratuita, es muy sencillo de utilizar y puedes almacenar tu trabajo en línea. Cuenta con diferentes modelos de ejemplo para orientar a todas aquellas personas principiantes que se introducen en el mundo del diseño de modelos 3D. Especialmente se dirige a un público infantil, ya que proporciona distintas lecciones con la finalidad de aprender de forma fácil la teoría más básica antes de pasar a usar técnicas de modelado más complicadas. Además, los usuarios son libres de compartir los scripts para que otras personas puedan utilizarlos o bien hacer variaciones del patrón realizado.
Protoboard – placa de prueba:
definicion : La Protoboard, llamada en inglés breadboard, es una placa de pruebas en los que se pueden insertar elementos electrónicos y cables con los que se arman circuitos sin la necesidad de soldar ninguno de los componentes. Las Protoboards tienen orificios conectados entre si por medio de pequeñas laminas metálicas. Usualmente, estas placas siguen un arreglo en el que los orificios de una misma fila están conectados entre si y los orificios en filas diferentes no. Los orificios de las placas normalmente están tienen una separación de 2.54 milímetros (0.1 pulgadas).
Una Protoboard es un instrumento que permite probar el diseño de un circuito sin la necesidad de soldar o desoldar componentes. Las conexiones en una Protoboard se hacen con solo insertar los componentes lo que permite armar y modificar circuitos con mayor velocidad.-https://blog.330ohms.com/2016/03/02/protoboards/
partes de un protoboard :
A) El canal central. Es la región localizada en el medio del protoboard, se utiliza para colocar l os circuitos integrados.
B) Buses. ...
C) Pistas. La pistas se localizan en la parte centraldel protoboard, se representan y conducen según las líneas rosas.
CARACTERISTICAS DE LA PROTOBOARD -La protoboard sirve para probar el correcto funcionamiento del circuito y depurarle las posibles fallas. ... horizontales no conducen. es un dispositivo en el cual se pueden montar y probar circuitos electrónicos. las perforaciones están interconectadas de manera longitudinal -https://es.scribd.com/document/248125379/Carcteristicas-Del-Protoboard
¿comó se utiliza un protoboard ?
Tarjeta arduino – Mega:
definición :
Arduino es una marca de microcontroladores mundialmente conocida por los amantes de la electrónica, la programación y la robótica. Es un proyecto Open Source que pone a disposición de sus usuarios una amplia gama de dispositivos basados en el microcontrolador AtMega. Es posible comprar una placa Arduino armada o conseguir las piezas para uno mismo desarrollar sus propios dispositivos.
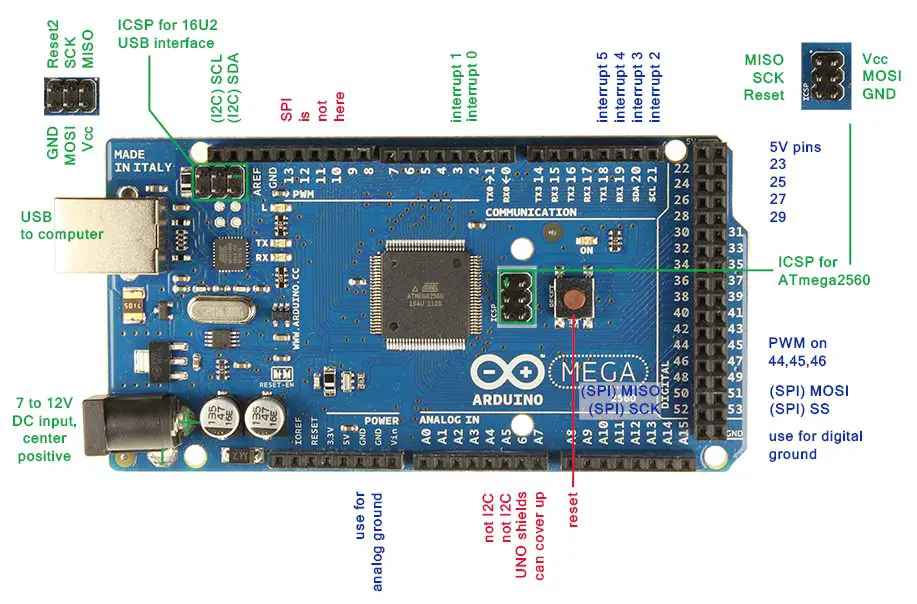
partes de la tarjeta arduino- mega
caracteristicas de la tarjeta :
Características:
Microcontrolador ATmega2560.
Voltaje de entrada de – 7-12V.
54 pines digitales de Entrada/Salida (14 de ellos son salidas PWM).
16 entradas análogas.
256k de memoria flash.
tipos y diferencias de tarjetas :
ESPECIFICACIONES ARDUINO MEGA 2560
Microcontrolador: ATmega2560
Voltaje Operativo: 5V
Tensión de Entrada: 7-12V
Voltaje de Entrada(límites): 6-20V
Pines digitales de Entrada/Salida: 54 (de los cuales 14 proveen salida PWM)
Pines análogos de entrada: 16
Corriente DC por cada Pin Entrada/Salida: 40 mA
Corriente DC entregada en el Pin 3.3V: 50 mA
Memoria Flash: 256 KB (8KB usados por el bootloader)
SRAM: 8KB
EEPROM: 4KB
Clock Speed: 16 MHz
VENTAJAS ARDUINO MEGA 2560
Es una placa de desarrollo robusta de la familia, cuenta con un microcontrolador muy potente de 8 bits y es el que mas pines tiene de todas las opciones posibles.
Tiene una memoria destinada a la programación elevada.